
 借阅:0人
借阅:0人
 收藏:0人
收藏:0人
机器人机械系统原理理论、方法和算法

- 查看机读格式
/(加)Jorg Angeles著 宋伟刚译
ISBN/ISSN:7-111-14503-8
价格:CNY48.00
出版:北京 机械工业出版社 ,2004.8
载体形态:ⅩⅣ,385页 图,照片 ;26cm
简介:本书主要内容包括解耦结构串联操作手的运动学和动力学;轨迹规划;根据刚体上点的数据确定角速度和角加速度;串联和并联操作手的运动学正问题和逆问题等。
附注:读者对象:工程技术人员。
中图分类号:TP242
责任者:安杰利斯 ((Angelds, J.)) 著 宋伟刚 译
- 机器人--机械系统
- 机械系统--机器人
-
评分:

-
 加入暂存架
加入暂存架
豆瓣内容简介:
本书以具体完成工作任务的机器人机械系统为对象,包括机器人操作手、多指灵巧手、步行机器人、并联机器人(飞行模拟器)和轮式机器人。目标是建立起在机器人设计、控制和操作方面起着重要基础作用的机器人机械系统原理。本书包含了进入机器人领域必备的数学基础和刚体力学基础,使本书自成体系,并包括一定数量的习题。
本书的主要内容包括解耦结构串联操作手的运动学和动力学;轨迹规划;根据刚体上点的数据确定角速度和角加速度;串联和并联操作手的运动学正问题和逆问题;平台型一般结构并联操作手动力学;以及轮式机器人的运动学和动力学。
书中系统的采用了螺旋理论,内容清晰,叙述详细。可作为相关专业的高年级本科生和研究生教材,也可供工程技术人员和研究人员参考。
本书的主要内容包括解耦结构串联操作手的运动学和动力学;轨迹规划;根据刚体上点的数据确定角速度和角加速度;串联和并联操作手的运动学正问题和逆问题;平台型一般结构并联操作手动力学;以及轮式机器人的运动学和动力学。
书中系统的采用了螺旋理论,内容清晰,叙述详细。可作为相关专业的高年级本科生和研究生教材,也可供工程技术人员和研究人员参考。
豆瓣作者简介:
暂无内容
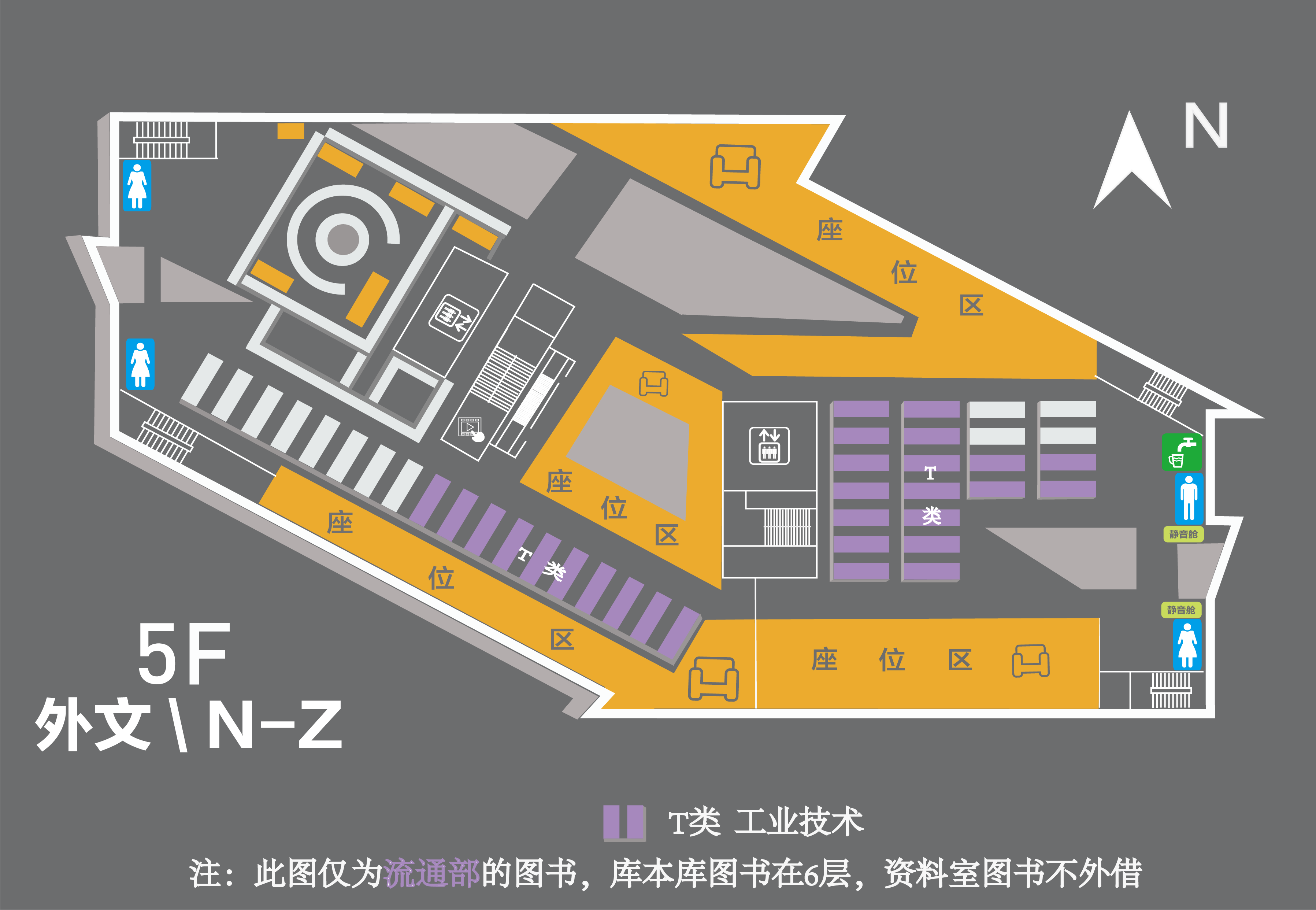 注:流通部 T 类藏书在图书馆五层!库本库藏书在图书馆六层(仅限在六层阅览)!资料室藏书归各学院管理,不外借! |
| 分馆名 | 馆藏部门 | 图书条码 | 索书号 | 登录号 | 卷期 | 状态 |
| A | 流通部 | 661685 | TP242/ANG | 661685 | 在架可借 | |
| A | 流通部 | 661684 | TP242/ANG | 661684 | 在架可借 | |
| A | 流通部 | 661686 | TP242/ANG | 661686 | 在架可借 |
| 序号 | 图书条码 | 索书号 | 登录号 | 藏书部门 | 流通状态 | 年卷期 | 装订册 | 装订方式 | 装订颜色 |
| 类型 | 说明 | URL |
| 评 论 |
评分:
发表

